走进“达芬奇”机器人
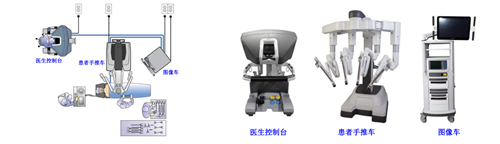
列奥纳多达芬奇痴迷于艺术和自然科学,他在1495年设计了一台仿人型机械,它拥有3~4条手臂,其中一条配备内窥镜,其它的配备了手术刀。根据达芬奇的设计手稿与理念美国Intuitive Surgical公司联合麻省理工大学将“达芬奇”机器人研发出来,旨在协助外科医生进行最小侵入性手术。“达芬奇”机器人系统由多个组件组成,包括一个机器人臂、一个操纵台和一台视觉化系统。
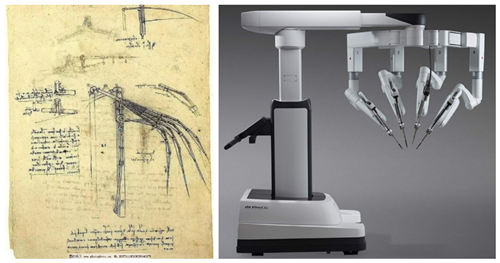
“达芬奇”机器人系统通过4只可360度灵活自由活动的尖端手臂,3D立体视频影像和人机界面控制台相互配合,分别充当外科医生的眼睛和手臂,在手术的过程中,主刀医生坐在符合人体工程学的达芬奇调试台边,通过调试台上的两个手柄来控制机器人的四只手臂,同时手术过程会实时呈现在3D立体视频影像中,被放大的视频画面增强了手术的精确性,通过机器人操控,主刀医生可以以舒适的坐姿稳定、自然的进行手术。机器人让医生拥有了更多可操控的手臂,所以能够更加精确、安全的进行复杂困难的手术,从而让手术的切口小,创伤小、出血少,患者恢复的时间也就大大的缩短了,更加有利于患者的术后康复。让手术变得更简单,更有益于患者的康复。
“达芬奇”机器人现在已经应用于心外科、胸外科、普外科、泌尿外科、妇科以及小儿外科等相关科室。随着信息技术的发展,“达芬奇”机器人将会进一步突破时间与空间的限制,未来在远程专家会诊、战地紧急手术等特殊情况下有不可替代的地位。
供稿 手术部 孙静 孙小雨
审稿 朱贺变